新4年生6名が,新たなメンバーとして加わりました.
みなさん,どうぞよろしくお願いします.
新4年生6名が,新たなメンバーとして加わりました.
みなさん,どうぞよろしくお願いします.
研究室のホームページが新しくなりました.
今後ともどうぞよろしくお願いいたします.
Current research is based around the need for snake like mobile robots to grasp and climb around cylindrical objects including thin ropes. Traditional helical torsion methods require large diameters and are limited in use by the snake power cord, which can easily tangle. New methods being researched can mitigate these issues. Joint simulation and control methods can also allow for climbing of dynamic structures like rope in addition to static pipes. Both parts of the research focus on minimizing parts costs, allowing for compatible systems to easily be upgraded with minimal sensor additions. The current test platform is an 18DoF modular robotic snake with an additional IMU sensor for orientation.
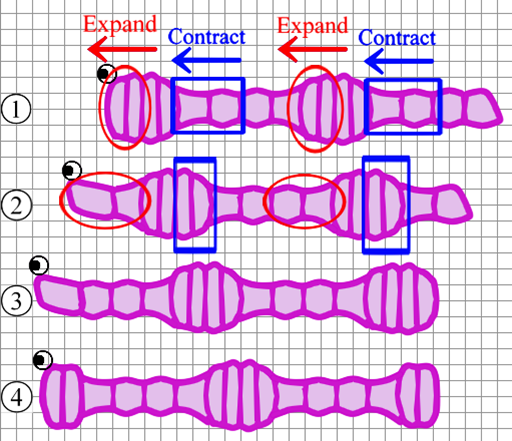
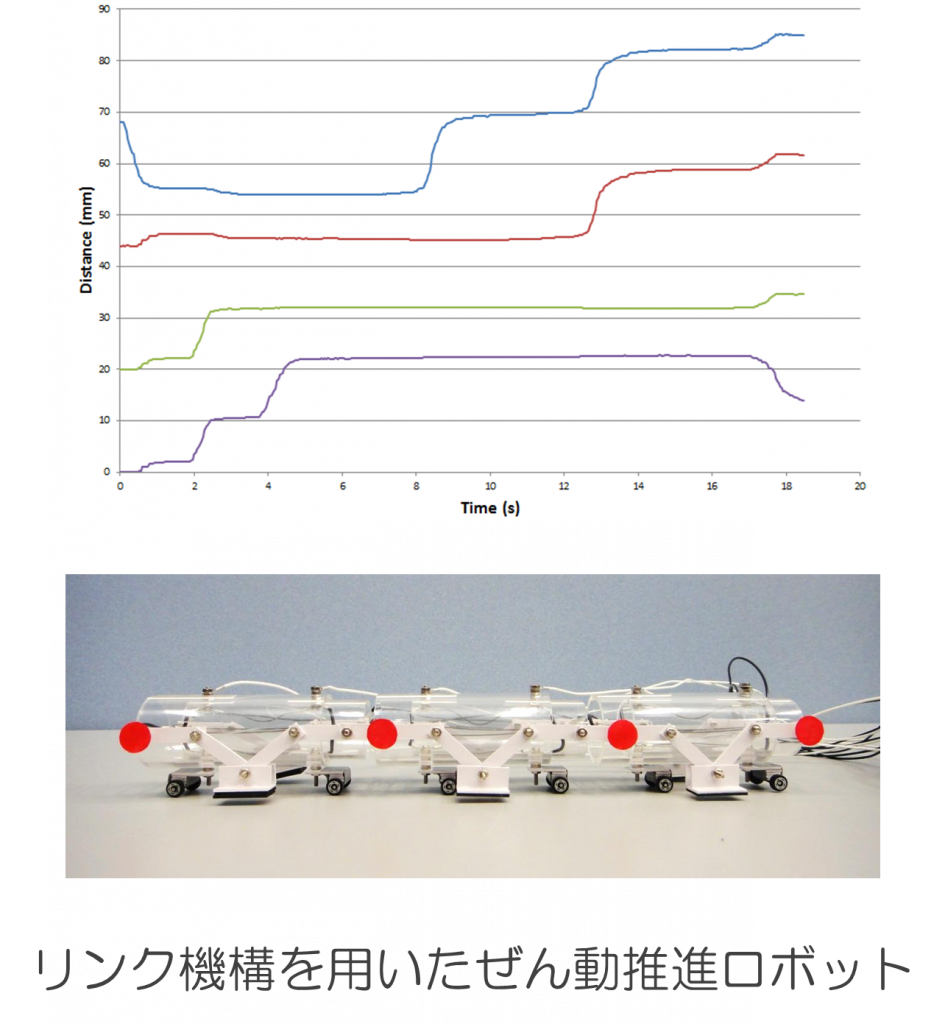
ミミズが行うぜん動運動は,狭路や不整地での運動が可能で,また接地圧が小さいため,柔らかい地面を推進できる,力学的に安定な姿勢で推進できるなどの利点を持つ.ぜん動運動を,SMA(形状記憶合金)を用いることでロボットへ適用し,狭所探査などへの活用を試みる.
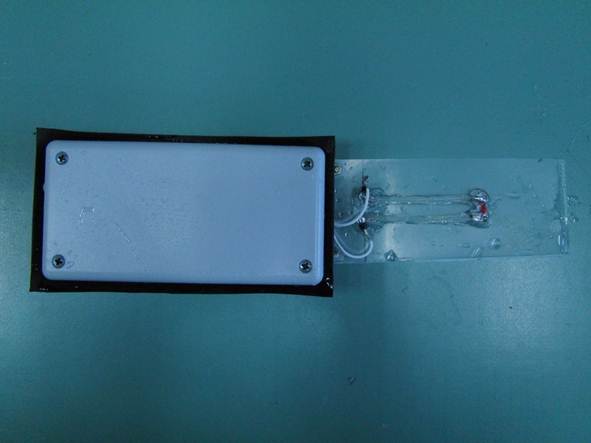
SMA(形状記憶合金)をアクチュエータとし,魚の遊泳を模倣したロボットの開発を進めている.
モータを利用したロボットに比べ,静音駆動が可能で,小型化が容易となる.

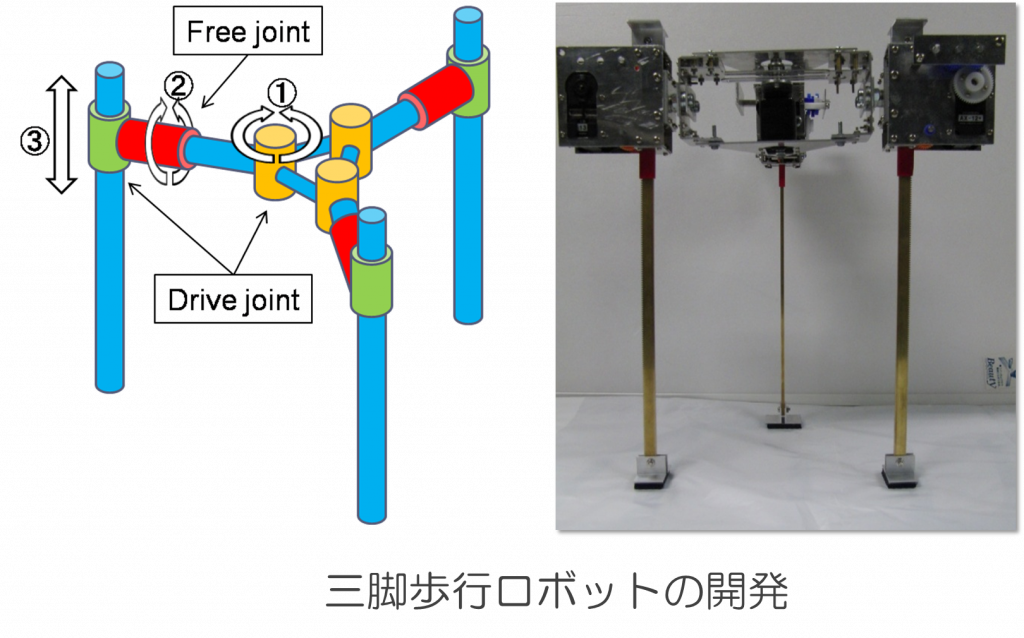
三足歩行ロボットは,二足歩行ロボットに比べ安定で,また四足歩行ロボットに比べ制御量が少なく済むなどの利点がある.振り子運動を利用した受動歩行機構を構築することで,最小量の制御で高効率な歩行を実現させる.

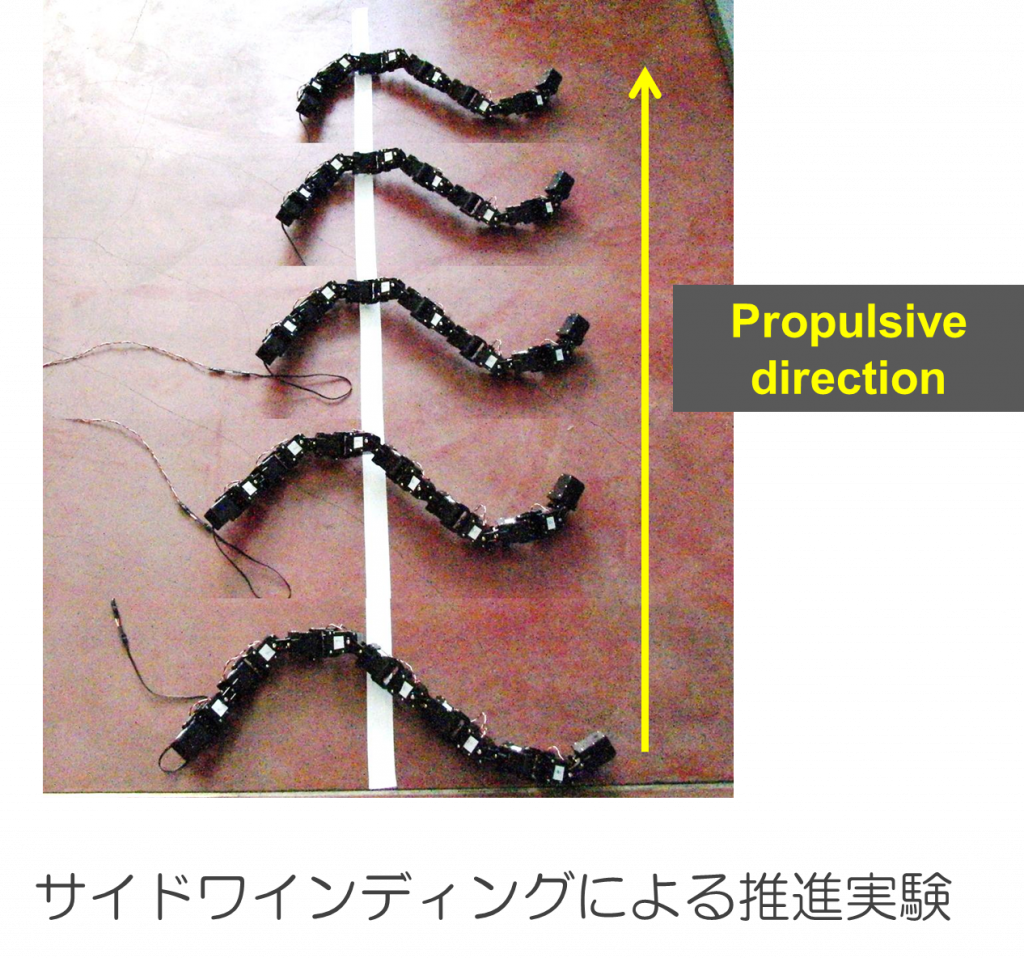
ヘビの運動のような胴体推進は,自重が分散され,結果軟弱地盤や雪氷上など様々な環境への適用が可能である.ロボットにこの動作を適用することで,探査や人命救助への活用が期待できる.


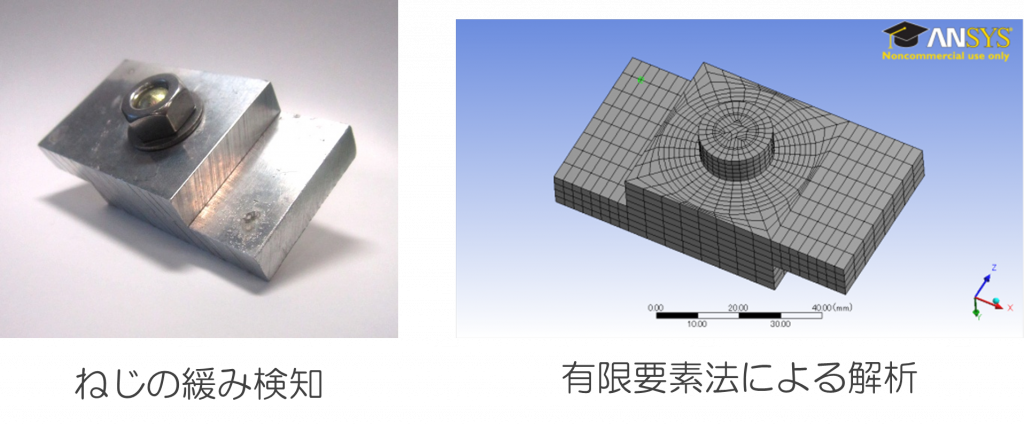
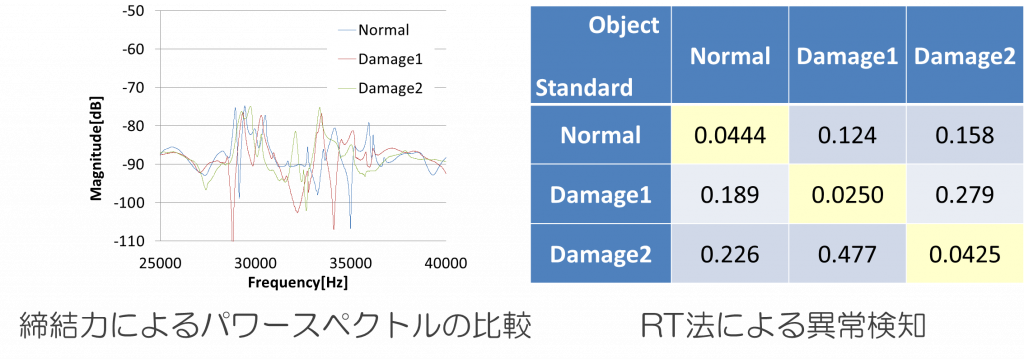
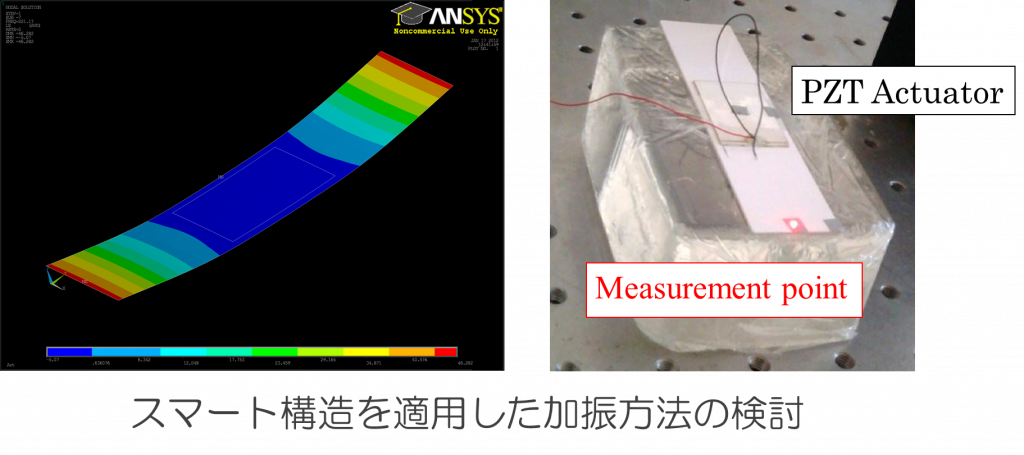
構造物に異常が存在すると、高周波帯域の振動特性が変化する.レーザー加振を用いた高精度な振動計測手法により異常を検知する.
生体組織の弾性率の測定結果は,医療において重要な診断材料である.従来は医師の触診に頼る部分が大きかったが,これを定量的に判断するため,MRIを応用したMR Elastography(MRE)と呼ばれる弾性率分布の計測手法の確立に向けた研究が行われている.本研究では,加振装置・方法の検討,生体組織の特性シミュレーション・計測などにより,MREにおける効果的な加振方法の確立を目指す.
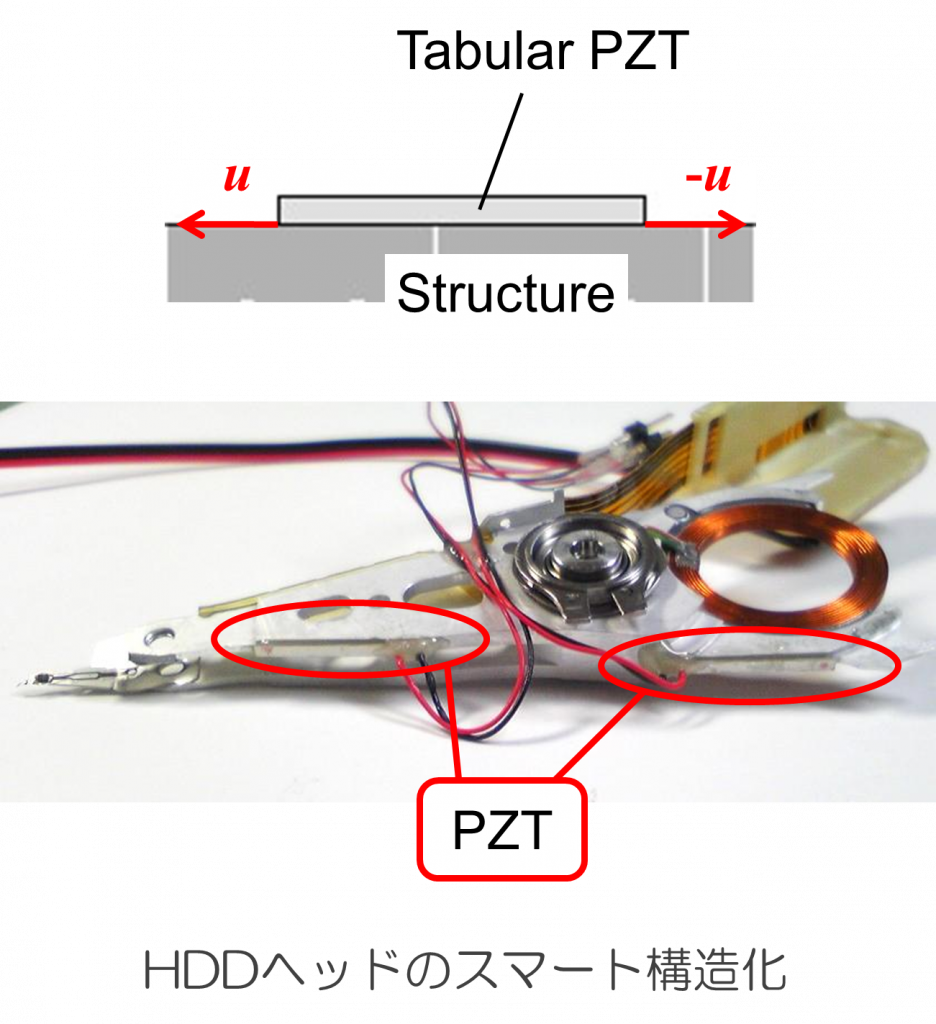
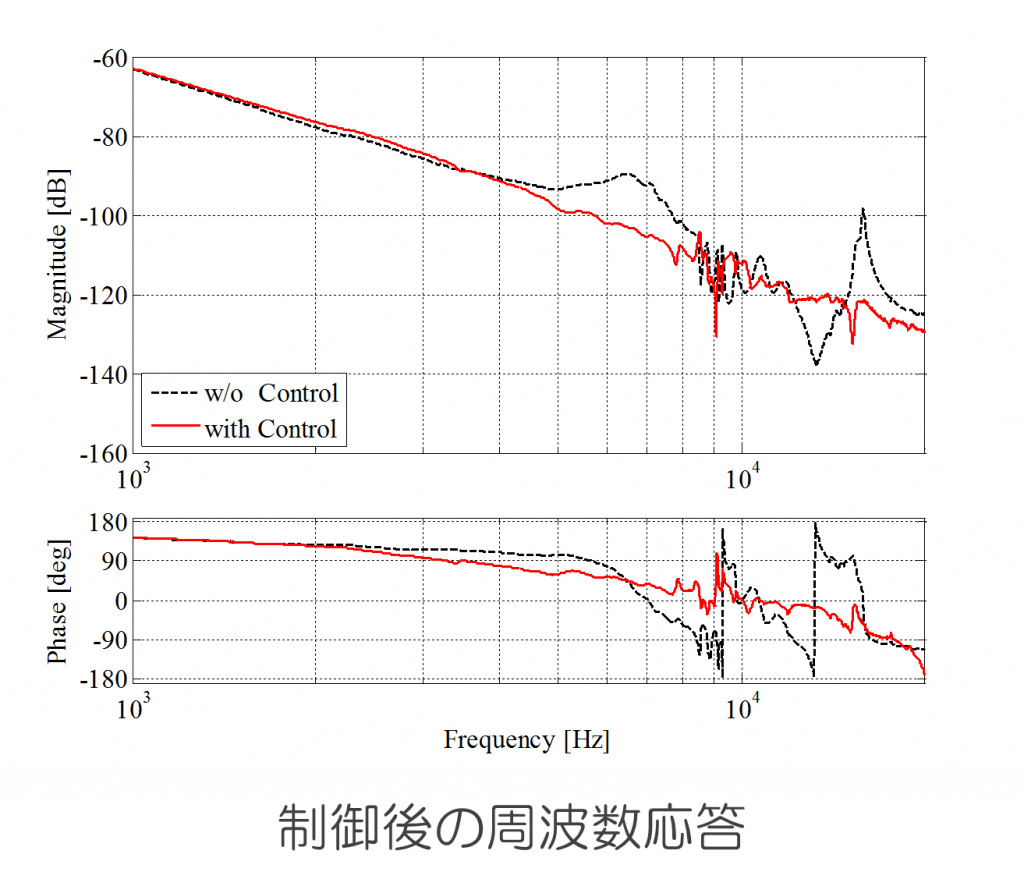
ハードディスクドライブ(HDD)の容量の増加のためには磁気ヘッドの位置決めの高精度化が必要であるが,高周波域の弾性振動が障害となっている.本研究ではHDDのヘッドをスマート構造化することにより,振動制御を行う.有限要素法により,アーム駆動機構をモデル化し,モーダル解析を行う.H∞制御問題に基づいたシミュレーションを行う.スマート構造化のためのアクチュエータとして,平板貼付型と慣性マス型の圧電素子を用い,遺伝的アルゴリズム(GA)によって,これらの配置の最適化を行う.また,物性値変動などの誤差を与えたモデルに対して,設計したコントローラと閉ループ系を組み,その制御性能と安定性を判別した結果からロバスト性能の高いセンサ配置を検討する.