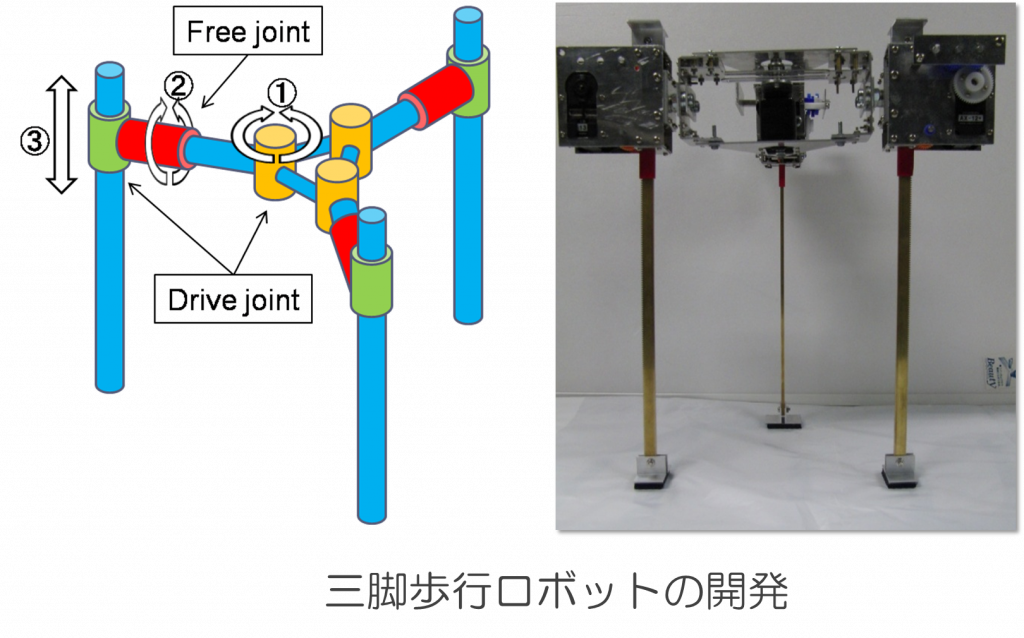
受動歩行を用いた三脚歩行ロボットの開発 投稿者 作成者: 管理人H 投稿日 2020-03-27 三足歩行ロボットは,二足歩行ロボットに比べ安定で,また四足歩行ロボットに比べ制御量が少なく済むなどの利点がある.振り子運動を利用した受動歩行機構を構築することで,最小量の制御で高効率な歩行を実現させる. シミュレーションによる三脚歩行ロボットの運動解析 ← 3次元運動によるヘビ型胴体推進ロボットの開発 → SMAを用いた水中遊泳ロボットの開発