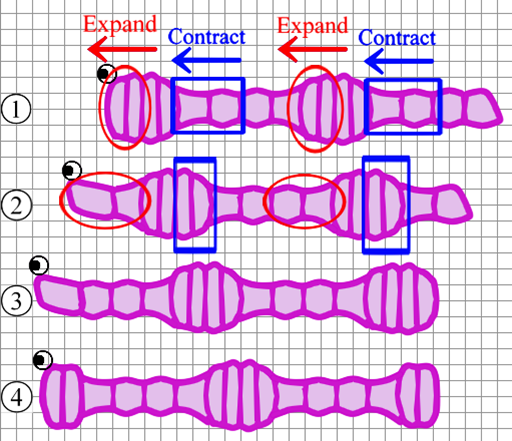
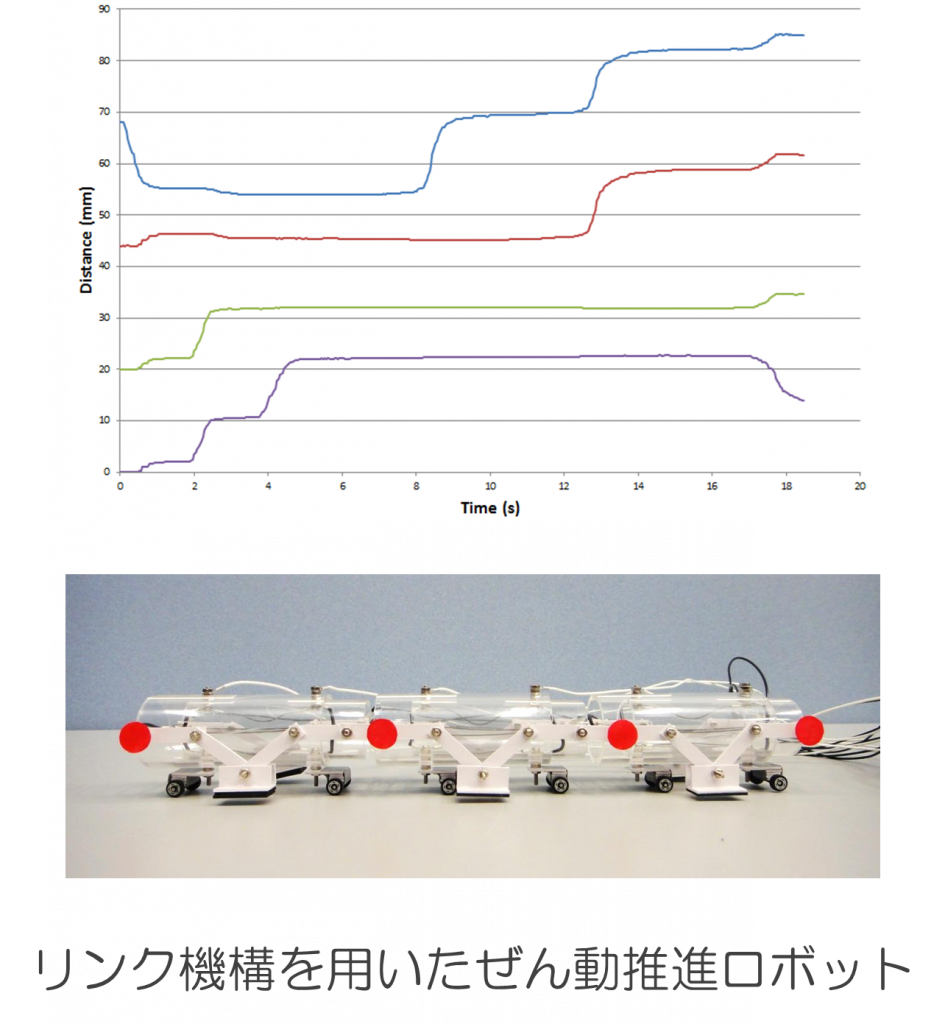
ミミズが行うぜん動運動は,狭路や不整地での運動が可能で,また接地圧が小さいため,柔らかい地面を推進できる,力学的に安定な姿勢で推進できるなどの利点を持つ.ぜん動運動を,SMA(形状記憶合金)を用いることでロボットへ適用し,狭所探査などへの活用を試みる.
ミミズが行うぜん動運動は,狭路や不整地での運動が可能で,また接地圧が小さいため,柔らかい地面を推進できる,力学的に安定な姿勢で推進できるなどの利点を持つ.ぜん動運動を,SMA(形状記憶合金)を用いることでロボットへ適用し,狭所探査などへの活用を試みる.